Manoj Kumar
Feb 6, CERN
- Masters Student at New York University
- Core developer of sklearn
- Contributed to Spark and SymPy
Contact¶
Tie all the ingredients together!¶
Call black box $f^*(X)$ $N$ times to obtain $D$ = $(X_1, y_1), (X_2, y_2), ... (X_N, y_N)$
For $n$ in $n_{calls}$
- Fit model to $D$
- Obtain $X_{c} = \underset{x}{\operatorname{argmin}}$ acq(x)
- $D$ = concat($D, (X_c, f^*(X_c))$)
Return $X_i$ for which $y_i$ is minimum.
Black-box function¶
Expensive to evaluate.
Noisy to evaluate.
Gradients unavailable.
If it does not satisfy any of these conditions, you should be looking at scipy.optimize (gradient-based optimization) and not scikit-optimize (bayesian-optimisation)!
Typical examples.¶
- Mean cross-validation score of a deep neural-network on test data
- Simulation of a collider to get results.
- Click-through-rate (CTR) for optimizing online advertisement display.
# Our black-box function for today.
import numpy as np
import matplotlib.pyplot as plt
from utils import black_box
all_x = np.reshape(np.linspace(0, 6, 100), (-1, 1))
all_f = [black_box(xi) for xi in all_x]
plt.plot(all_x, all_f)
plt.show()

High level usage¶
import numpy as np
from skopt import gp_minimize
from utils import black_box
# Provide initial points from 5.0 - 6.0, away from the original minimum.
x0 = np.reshape(np.linspace(5.0, 6.0, 10), (-1, 1)).tolist()
y0 = [black_box(xi) for xi in x0]
# Search for minimum from 0.0 - 6.0
dimensions = [[0.0, 6.0],]
# Optimize!
res = gp_minimize(
black_box,
dimensions=dimensions,
x0=x0,
y0=y0,
n_random_starts=0,
n_calls=4,
random_state=0
)
print(res["x"])
[2.441]
Let's go one level deeper¶
from skopt.optimizer import Optimizer
from skopt.learning import GaussianProcessRegressor
# Search from 0.0 to 6.0
dimensions = ((0.0, 6.0),)
# Initialize estimator.
gpr = GaussianProcessRegressor(kernel=Matern(), noise=0.0)
optimizer = Optimizer(
dimensions=dimensions,
base_estimator=gpr,
n_random_starts=0,
acq_func="LCB",
random_state=0)
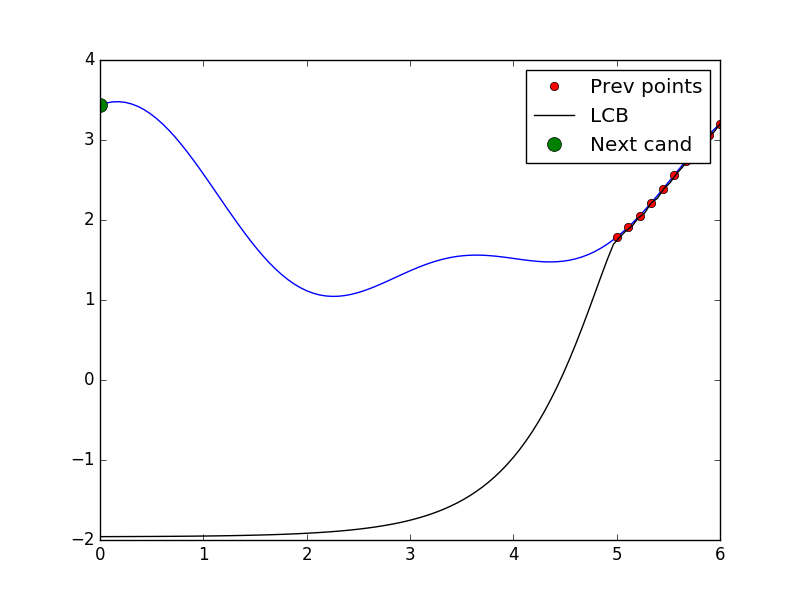
Tell some points and ask for a point¶
# Plotting search space with previously seen points, candidate point and acquisition values
from utils import plot_space
from utils import black_box
# As before use points from 5.0 to 6.0
X = np.reshape(np.linspace(5.0, 6.0, 10), (-1, 1)).tolist()
y = [black_box(xi) for xi in X]
optimizer.tell(X, y)
x_cand = optimizer.ask()
y_cand = black_box(x_cand)
plot = plot_space(X, y, optimizer.models[-1], x_cand)
plot.show()
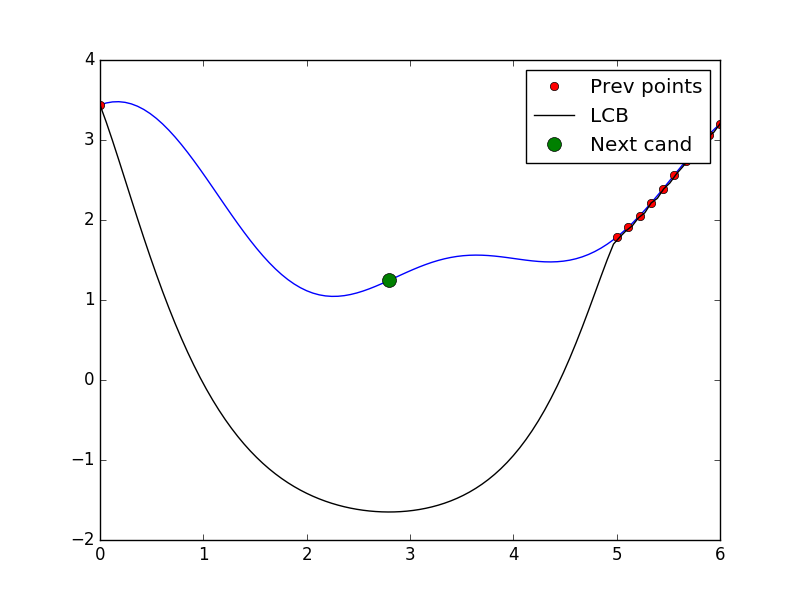
Tell and ask again!¶
# Tell and ask again.
optimizer.tell(x_cand, y_cand)
X = X + [x_cand]
y = y + [y_cand]
x_cand = optimizer.ask()
y_cand = black_box(x_cand)
plot = plot_space(X, y, optimizer.models[-1], x_cand)
plot.show()
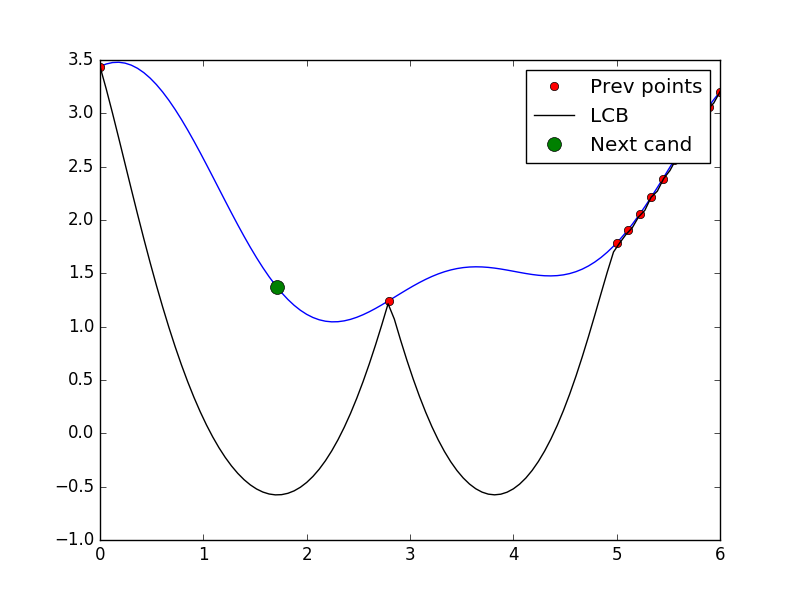
Tell and ask again!¶
# Tell and ask again.
optimizer.tell(x_cand, y_cand)
X = X + [x_cand]
y = y + [y_cand]
x_cand = optimizer.ask()
y_cand = black_box(x_cand)
plot = plot_space(X, y, optimizer.models[-1], x_cand)
plot.show()
More deeper:¶
Predictive model¶
- Should provide a predictive distribution $P(Y | X)$ at every point.
- Cheap approximation to the actual function.
- Provides information about the variance in the function approximation.
- Examples: Gaussian Processes, Random Forests
Will focus on Gaussian Processes on the rest of this talk, though Random Forests are highly useful when there a high number of categorical variables.
Gaussian Processes - Training¶
Assume the points $D = (X_1, y_1), (X_2, y_2), ... (X_N, y_N)$ are obtained from the black box.
Recenter the points $y_i$ such that the mean is zero.
Now the assumption is that $y$ forms a multivariate normal distribution.
Mean of size $N$ given by the origin.
The covariance matrix $K^D$ is computed by a kernel $K$.
Each element $K^D_{ij}$ is given by $K(X_i, X_j)$
Gaussian Processes - What to train?¶
Different kernels hold different assumptions about the smoothness of the functions.
Available kernels in skopt can be seen here
Also, different covariance matrices have different (hyper)parameters.
For example, the squared exponential kernel has a different length scale for each dimension.
In the sklearn implementation, "best" parameters are obtained by maximizing the log-likelihood on training data
Gaussian Processes - Prediction¶
For new points, the posterior is also multivariate gaussian.
This gives not only a prediction but also a probability distribution for every new point.
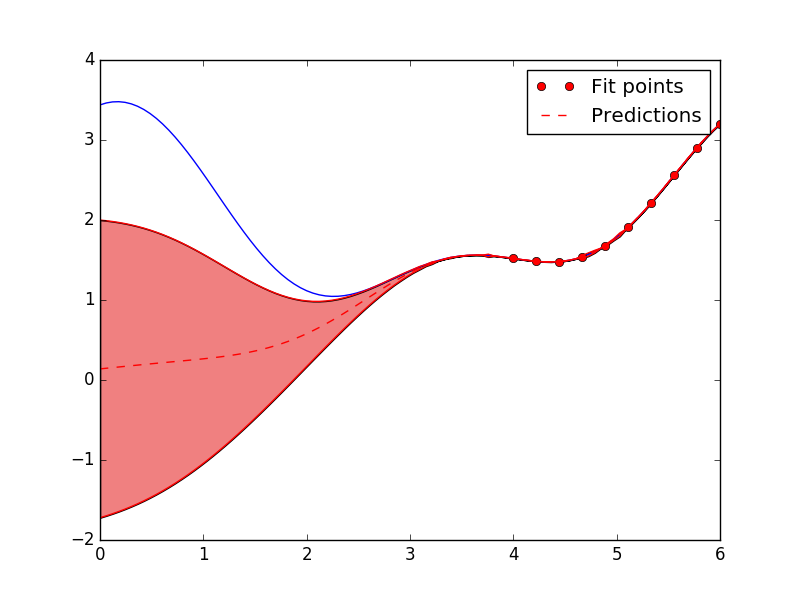
Code example¶
# Import necessary stuff
from skopt.learning import GaussianProcessRegressor
from skopt.learning.gaussian_process.kernels import RBF
# Evenly spaced points from 0-6
all_x = np.reshape(np.linspace(0, 6, 100), (-1, 1))
all_f = [black_box(xi) for xi in all_x]
plt.plot(all_x, all_f)
# Fit on only one third of the training data.
X = np.reshape(np.linspace(4, 6, 10), (-1, 1))
y = [black_box(xi) for xi in X]
# Use RBF kernel.
rbf = RBF(length_scale=1.0)
gpr = GaussianProcessRegressor(kernel=rbf, alpha=1e-12)
gpr.fit(X, y)
plt.plot(np.ravel(X), y, "ro", label="True function")
# Predict on all data to obtain uncertainty estimates
y_pred, y_std = gpr.predict(all_x, return_std=True)
all_x_plot = np.ravel(all_x)
upper_bound = y_pred + 1.96*y_std
lower_bound = y_pred - 1.96*y_std
plt.plot(all_x_plot, y_pred, "r--", label="Predictions")
plt.plot(all_x_plot, lower_bound, color="red")
plt.plot(all_x_plot, upper_bound, color="red")
plt.fill_between(all_x_plot, lower_bound, upper_bound, facecolor="lightcoral")
plt.legend()
plt.show()
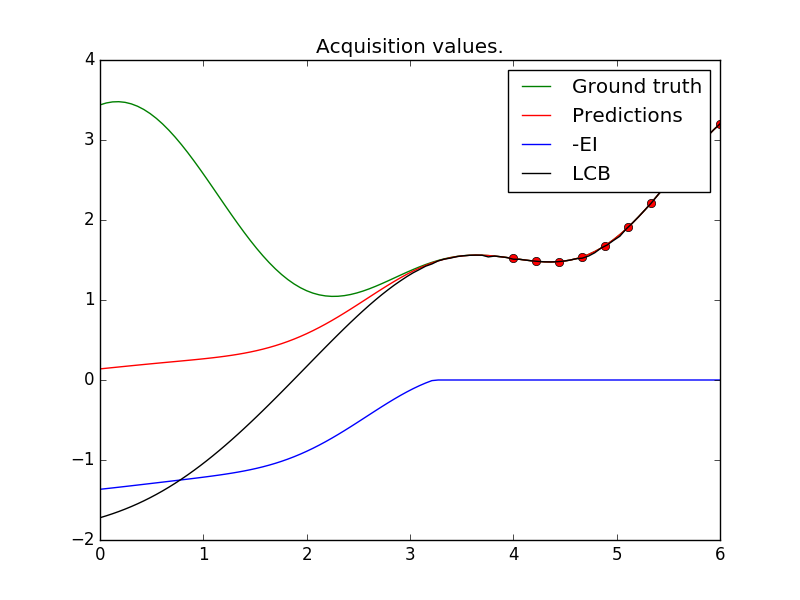
Acquisition functions¶
- Combines information about the best values (known) and uncertainty information (unknown).
- Tradeoff between exploration and exploitation.
- Popular acquisition functions include LCB(Lower Confidence Bound) and EI(Expected Improvement)
Lower Confidence Bound¶
- $A(x) = \mu(x) - \kappa \sigma(x)$
- $\kappa$ controls exploitation vs exploration
Expected Improvement¶
- $A(x) = E_{f(x)}(u(f(x)))$
- $u(f) = 0$, if $f(x) > f^*$
- $u(f) = f^* - f$ otherwise
- Available in closed form!
- Awards proportional to the amount of improvement over the best value.
Code example¶
from skopt.acquisition import gaussian_ei
from skopt.acquisition import gaussian_lcb
ei_vals = -gaussian_ei(all_x, gpr, y_opt=np.min(y))
lcb_vals = gaussian_lcb(all_x, gpr)
plt.plot(all_x_plot, ei_vals, "b", label="-EI")
plt.plot(all_x_plot, lcb_vals, "black", label="LCB")
Optimising the acquisition function¶
- Calling the acquisition function no longer expensive.
- Can now be optimised using other techniques.
How does scikit-optimize handle this?¶
- Default is multi-start lbfgs.
- Start points are obtained by the "best" points on a uniform-grid
- More advanced techniques like entropy-search, DIRECT (soon in skopt)